Řízení krokového motoru procesorem PIC 16F84
Pro své pokusy s krokovými motory jsem potřeboval vytvořit jednoduchou řídící jednotku pro přepínání jednotlivých fází na základě série příchozích impulsů. Po prvotních pokusech s logickými obvody TTL jsem nakonec dospěl až k mikroprocesoru PIC 16F84. Jeho použití celé zapojení značně zjednodušilo a umožňuje i pozdější změny v podobě aktualizace programu.
schéma zapojení řídící jednotky s PIC 16F84
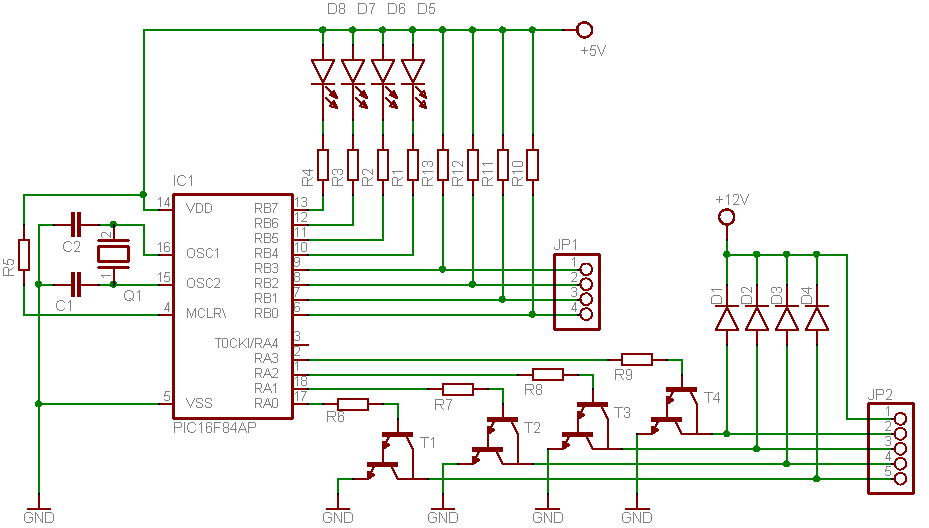
Zapojení je velmi jednoduché. Srdcem je procesor PIC 16F84, který přes tranzistory T1 - T4 přepíná jednotlivé fáze. Na ovládání stačí dva vstupy. Impulsy, podle kterých se fáze přepínají, jsou přivedeny na vstup RB0, a generujeme je například v PC. Využívá se sestupné hrany impulsu. Lze ji změnit na náběžnou hranu jednoduchou úpravou a překompilováním programu. RB1 se používá na přepínání směru otáčení. Ostatní vstupy se zatím nevyužívají. LED1 - LED4 signalizují právě sepnutou fázi a nemusíme je používat. Napájení procesoru je 5V, výkonové části dle použitého motoru resp. tranzistorů. Fáze motoru se připojují na tranzistory v pořadí: A na T1, B na T2, atd.
seznam součástek: | |
| IO1 | PIC 16F84 |
| Q1 | 4 MHz |
| T1-T4 | TIP122 |
| D1-D4 | 1N4007 |
| LED1-LED4 | LED dle volby |
| C1,C2 | 22p |
| R1-R4 | 470 |
| R5,R10-R13 | 4k7 |
| R6-R9 | 2k2 |
download:
program pro PIC 16F84 - nastavení v programátoru: osc: XT, WDT: offschéma zapojení
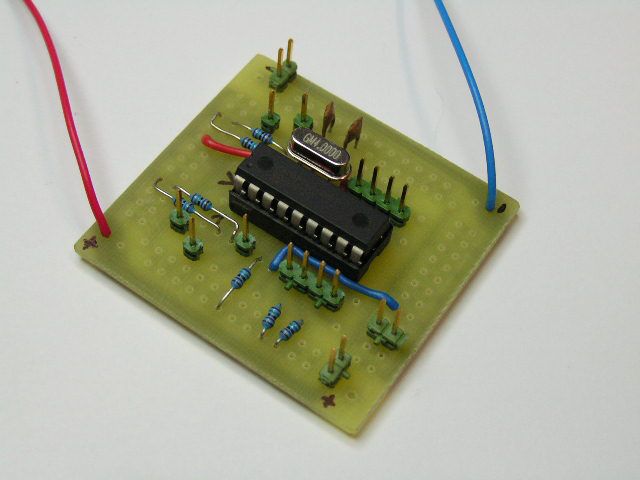
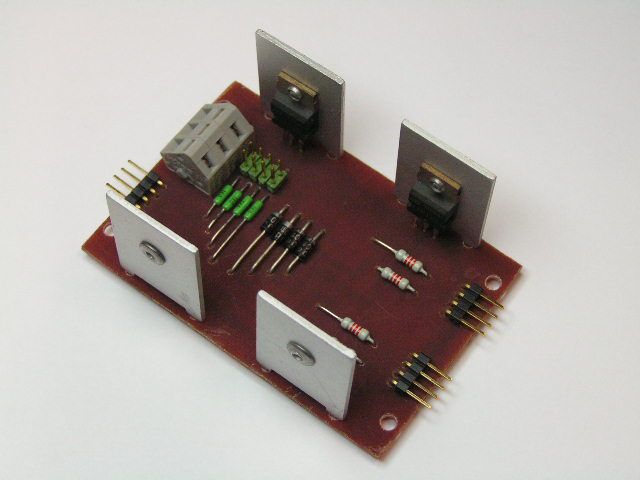
foto vývojové verze: